# usls
A Rust library integrated with **ONNXRuntime**, providing a collection of **Computer Vison** and **Vision-Language** models including [YOLOv5](https://github.com/ultralytics/yolov5), [YOLOv8](https://github.com/ultralytics/ultralytics), [YOLOv9](https://github.com/WongKinYiu/yolov9), [YOLOv10](https://github.com/THU-MIG/yolov10), [RTDETR](https://arxiv.org/abs/2304.08069), [CLIP](https://github.com/openai/CLIP), [DINOv2](https://github.com/facebookresearch/dinov2), [FastSAM](https://github.com/CASIA-IVA-Lab/FastSAM), [YOLO-World](https://github.com/AILab-CVC/YOLO-World), [BLIP](https://arxiv.org/abs/2201.12086), [PaddleOCR](https://github.com/PaddlePaddle/PaddleOCR), [Depth-Anything](https://github.com/LiheYoung/Depth-Anything), [MODNet](https://github.com/ZHKKKe/MODNet) and others.
## Recently Updated
| YOLOv8-Obb |
| :----------------------------: |
|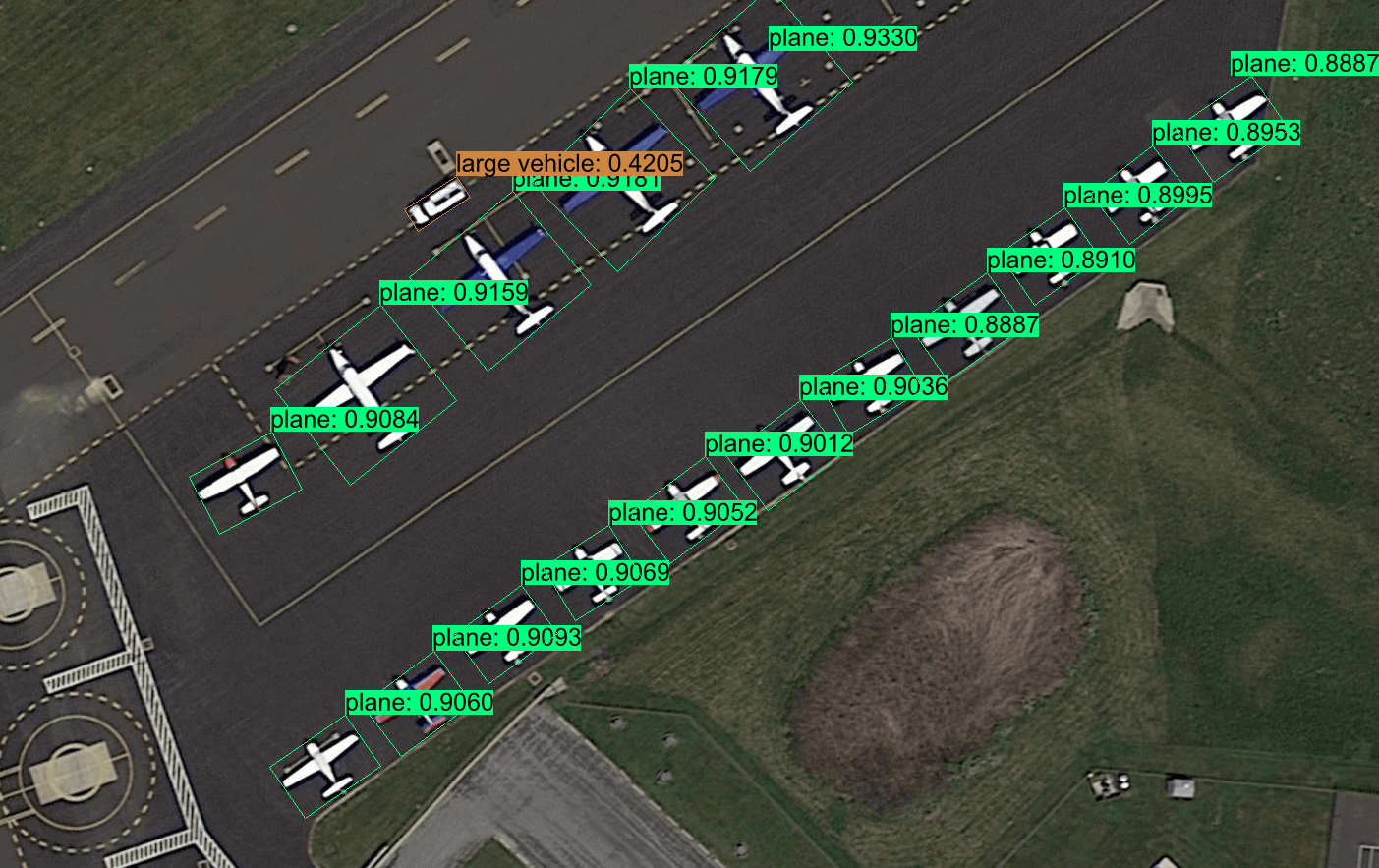 |
| Depth-Anything |
| :----------------------------: |
|
|
| Depth-Anything |
| :----------------------------: |
|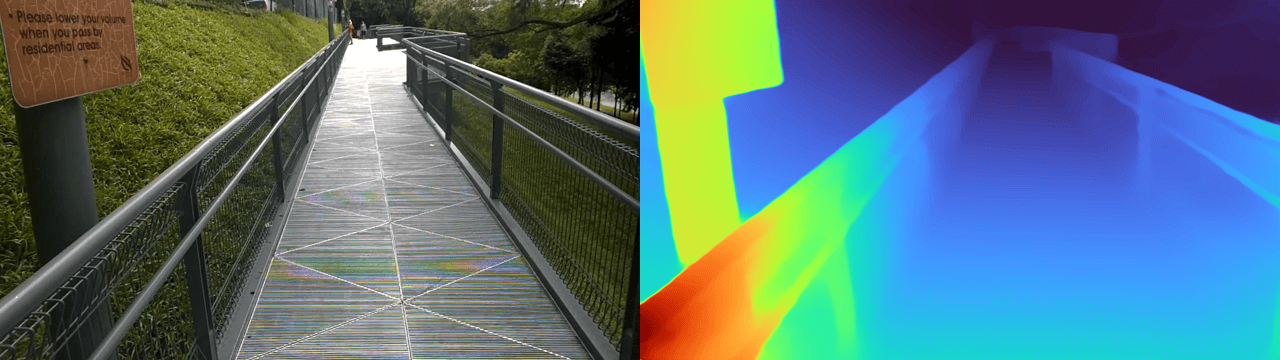 |
| Portrait Matting |
| :----------------------------: |
|
|
| Portrait Matting |
| :----------------------------: |
|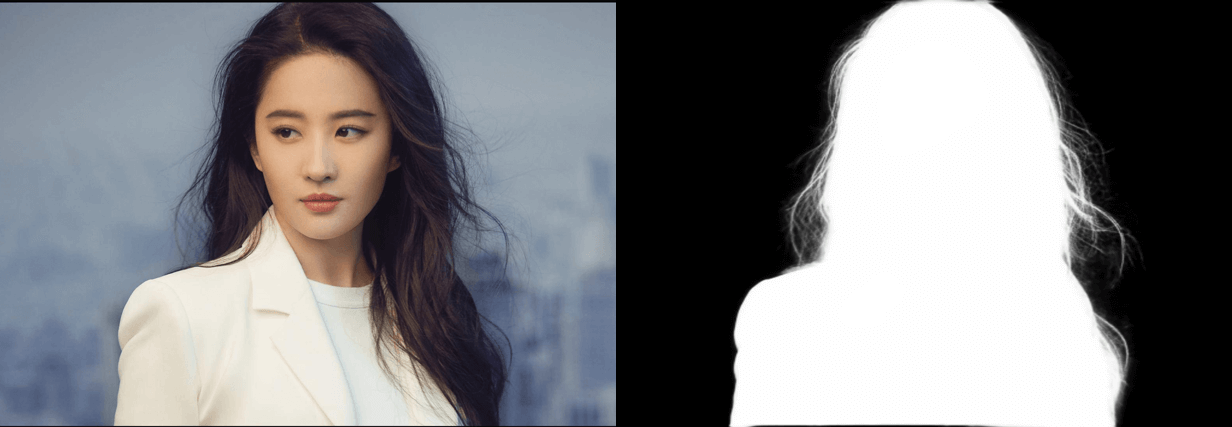 |
| YOLOP-v2 | Face-Parsing | Text-Detection |
| :----------------------------: | :------------------------------: | :------------------------------: |
|
|
| YOLOP-v2 | Face-Parsing | Text-Detection |
| :----------------------------: | :------------------------------: | :------------------------------: |
| |
|  |
|  |
## Supported Models
| Model | Task / Type | Example | CUDA
|
## Supported Models
| Model | Task / Type | Example | CUDA
f32 | CUDA
f16 | TensorRT
f32 | TensorRT
f16 |
| :---------------------------------------------------------------: | :-------------------------: | :----------------------: | :-----------: | :-----------: | :------------------------: | :-----------------------: |
| [YOLOv8-obb](https://github.com/ultralytics/ultralytics) | Oriented Object Detection | [demo](examples/yolov8) | ✅ | ✅ | ✅ | ✅ |
| [YOLOv8-detection](https://github.com/ultralytics/ultralytics) | Object Detection | [demo](examples/yolov8) | ✅ | ✅ | ✅ | ✅ |
| [YOLOv8-pose](https://github.com/ultralytics/ultralytics) | Keypoint Detection | [demo](examples/yolov8) | ✅ | ✅ | ✅ | ✅ |
| [YOLOv8-classification](https://github.com/ultralytics/ultralytics) | Classification | [demo](examples/yolov8) | ✅ | ✅ | ✅ | ✅ |
| [YOLOv8-segmentation](https://github.com/ultralytics/ultralytics) | Instance Segmentation | [demo](examples/yolov8) | ✅ | ✅ | ✅ | ✅ |
| [YOLOv9](https://github.com/WongKinYiu/yolov9) | Object Detection | [demo](examples/yolov9) | ✅ | ✅ | ✅ | ✅ |
| [YOLOv10](https://github.com/THU-MIG/yolov10) | Object Detection | [demo](examples/yolov10) | ✅ | ✅ | ✅ | ✅ |
| [RT-DETR](https://arxiv.org/abs/2304.08069) | Object Detection | [demo](examples/rtdetr) | ✅ | ✅ | ✅ | ✅ |
| [FastSAM](https://github.com/CASIA-IVA-Lab/FastSAM) | Instance Segmentation | [demo](examples/fastsam) | ✅ | ✅ | ✅ | ✅ |
| [YOLO-World](https://github.com/AILab-CVC/YOLO-World) | Object Detection | [demo](examples/yolo-world) | ✅ | ✅ | ✅ | ✅ |
| [DINOv2](https://github.com/facebookresearch/dinov2) | Vision-Self-Supervised | [demo](examples/dinov2) | ✅ | ✅ | ✅ | ✅ |
| [CLIP](https://github.com/openai/CLIP) | Vision-Language | [demo](examples/clip) | ✅ | ✅ | ✅ visual
❌ textual | ✅ visual
❌ textual |
| [BLIP](https://github.com/salesforce/BLIP) | Vision-Language | [demo](examples/blip) | ✅ | ✅ | ✅ visual
❌ textual | ✅ visual
❌ textual |
| [DB](https://arxiv.org/abs/1911.08947) | Text Detection | [demo](examples/db) | ✅ | ✅ | ✅ | ✅ |
| [SVTR](https://arxiv.org/abs/2205.00159) | Text Recognition | [demo](examples/svtr) | ✅ | ✅ | ✅ | ✅ |
| [RTMO](https://github.com/open-mmlab/mmpose/tree/main/projects/rtmo) | Keypoint Detection | [demo](examples/rtmo) | ✅ | ✅ | ❌ | ❌ |
| [YOLOPv2](https://arxiv.org/abs/2208.11434) | Panoptic Driving Perception | [demo](examples/yolop) | ✅ | ✅ | ✅ | ✅ |
| [YOLOv5-classification](https://github.com/ultralytics/yolov5) | Object Detection | [demo](examples/yolov5) | ✅ | ✅ | ✅ | ✅ |
| [YOLOv5-segmentation](https://github.com/ultralytics/yolov5) | Instance Segmentation | [demo](examples/yolov5) | ✅ | ✅ | ✅ | ✅ |
| [Depth-Anything](https://github.com/LiheYoung/Depth-Anything) | Monocular Depth Estimation | [demo](examples/depth-anything) | ✅ | ✅ | ❌ | ❌ |
| [MODNet](https://github.com/ZHKKKe/MODNet) | Image Matting | [demo](examples/modnet) | ✅ | ✅ | ✅ | ✅ |
## Solution Models
Additionally, this repo also provides some solution models.
| Model | Example | Result |
| :---------------------------------------------------------------------------------------------------------: | :------------------------------: | :-----------------------------------------------------------------------------: |
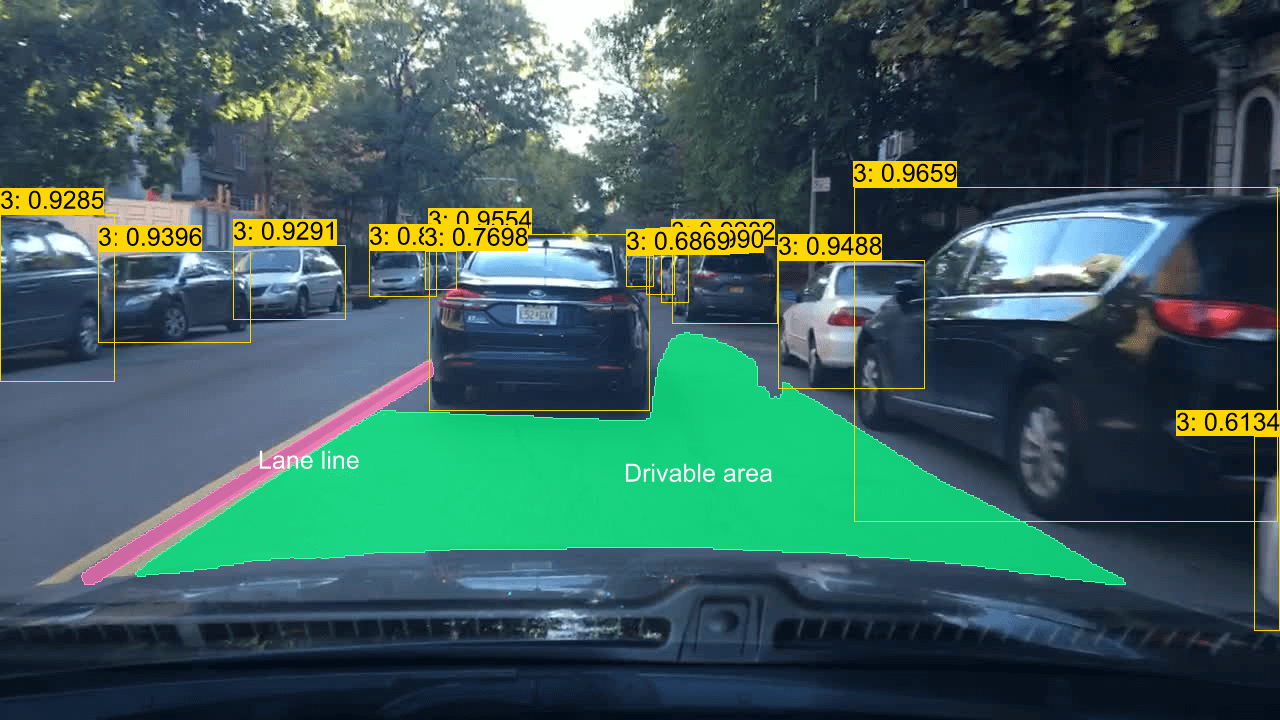
| Lane Line Segmentation
Drivable Area Segmentation
Car Detection
车道线-可行驶区域-车辆检测 | [demo](examples/yolov8-plastic-bag) | |
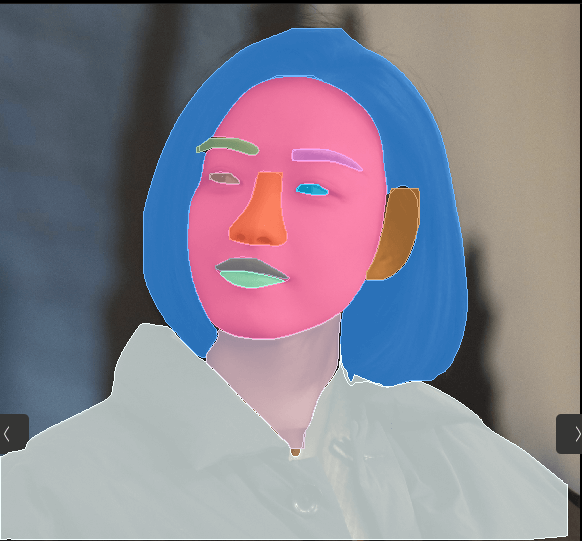
| Face Parsing
人脸解析 | [demo](examples/face-parsing) | |
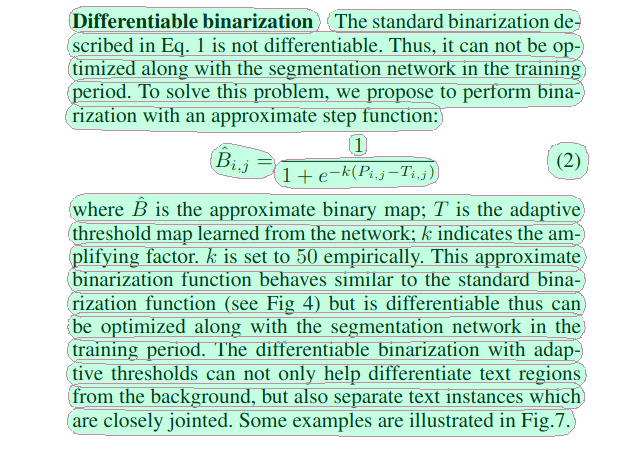
| Text Detection
(PPOCR-det v3, v4)
通用文本检测 | [demo](examples/db) | |
| Text Recognition
(PPOCR-rec v3, v4)
中英文-文本识别 | [demo](examples/svtr) | |
| Face-Landmark Detection
人脸 & 关键点检测 | [demo](examples/yolov8-face) | 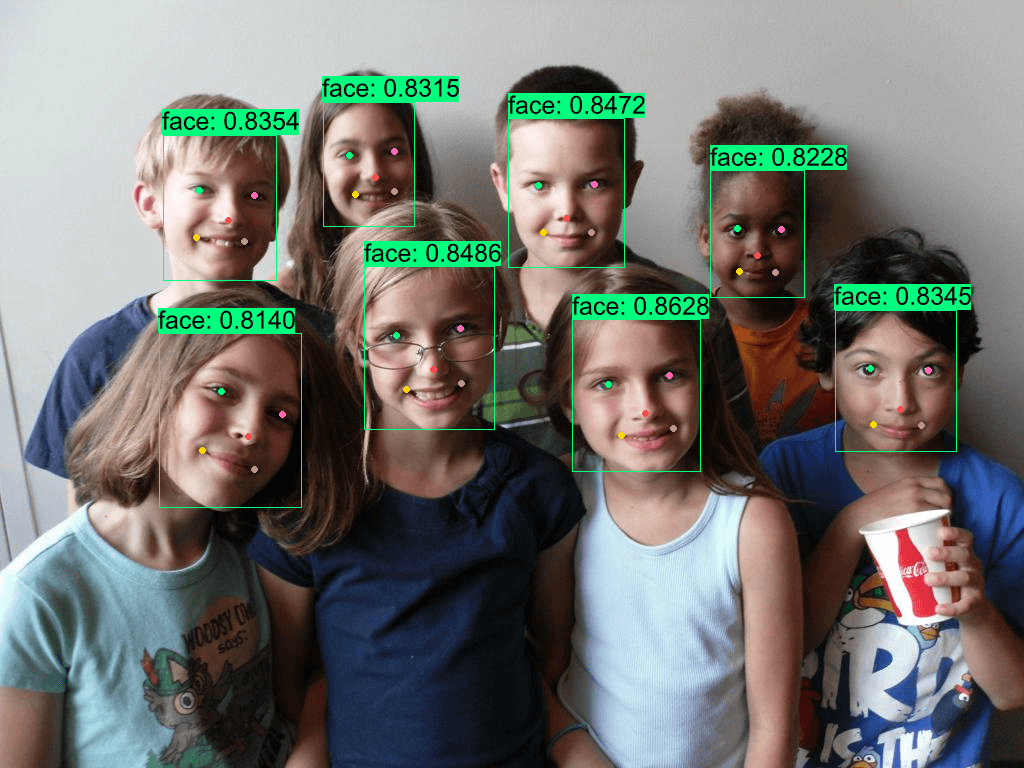 |
| Head Detection
|
| Head Detection
人头检测 | [demo](examples/yolov8-head) | 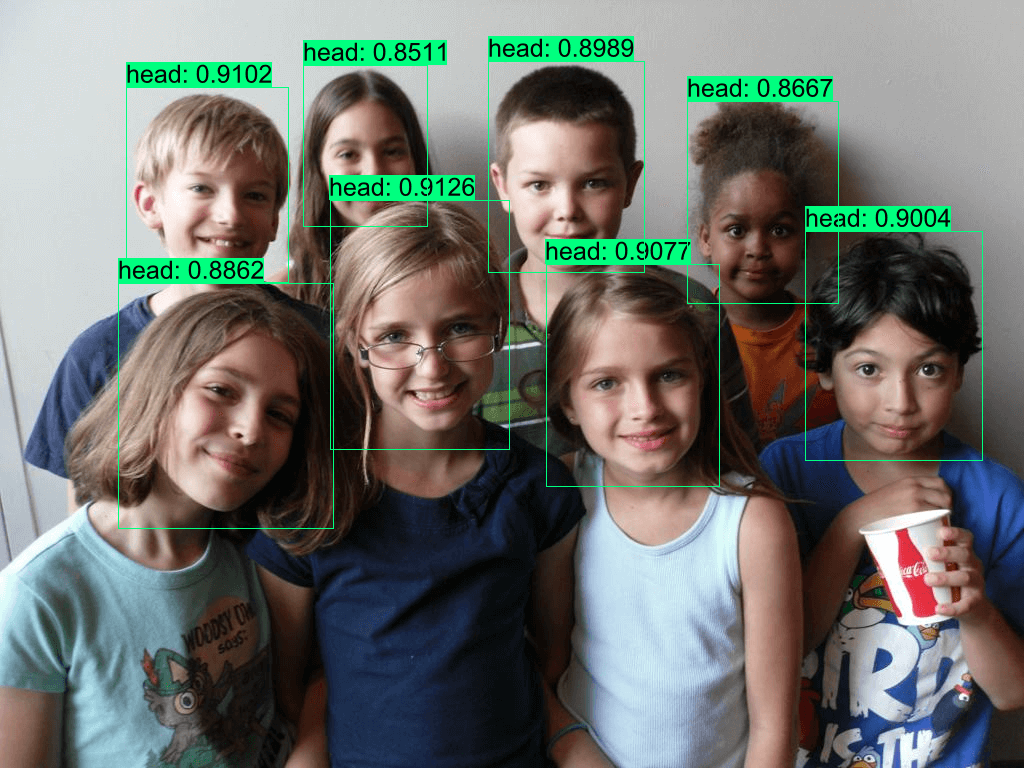 |
| Fall Detection
|
| Fall Detection
摔倒检测 | [demo](examples/yolov8-falldown) | 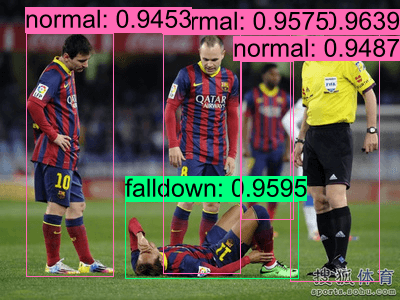 |
| Trash Detection
|
| Trash Detection
垃圾检测 | [demo](examples/yolov8-plastic-bag) | 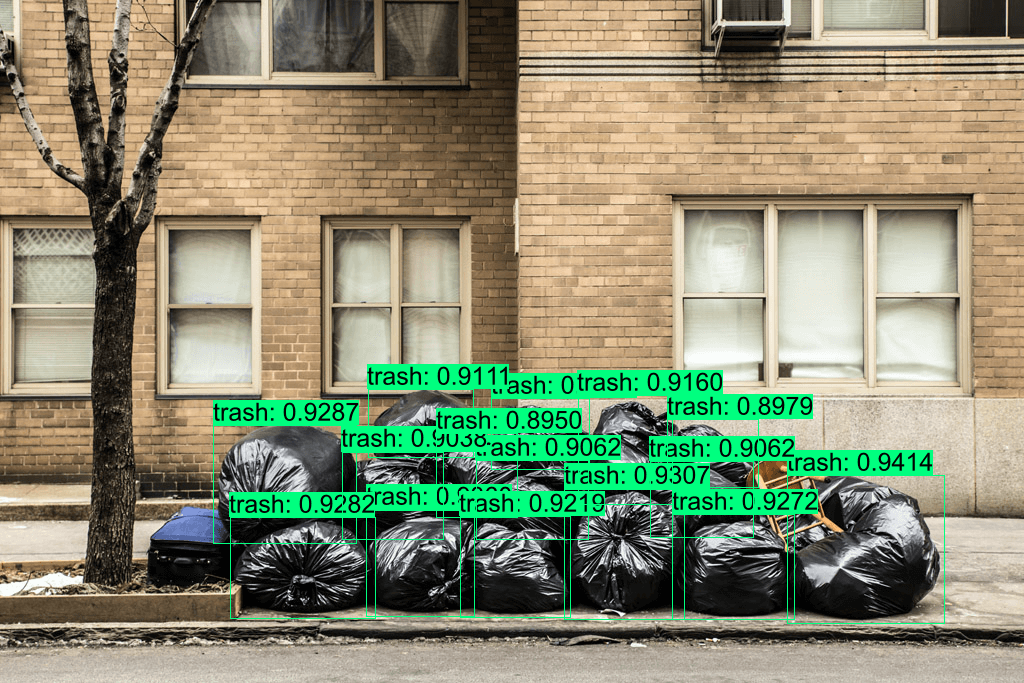 |
|
## Demo
```
cargo run -r --example yolov8 # yolov9, blip, clip, dinov2, svtr, db, yolo-world...
```
## Installation
check **[ort guide](https://ort.pyke.io/setup/linking)**
For Linux or MacOS users
- Firstly, download from latest release from [ONNXRuntime Releases](https://github.com/microsoft/onnxruntime/releases)
- Then linking
```shell
export ORT_DYLIB_PATH=/Users/qweasd/Desktop/onnxruntime-osx-arm64-1.17.1/lib/libonnxruntime.1.17.1.dylib
```
## Integrate into your own project
Expand
#### 1. Add `usls` as a dependency to your project's `Cargo.toml`
```shell
cargo add --git https://github.com/jamjamjon/usls
```
#### 2. Set `Options` and build model
```Rust
let options = Options::default()
.with_model("../models/yolov8m-seg-dyn-f16.onnx");
let mut model = YOLO::new(options)?;
```
- If you want to run your model with TensorRT or CoreML
```Rust
let options = Options::default()
.with_trt(0) // using cuda by default
// .with_coreml(0)
```
- If your model has dynamic shapes
```Rust
let options = Options::default()
.with_i00((1, 2, 4).into()) // dynamic batch
.with_i02((416, 640, 800).into()) // dynamic height
.with_i03((416, 640, 800).into()) // dynamic width
```
- If you want to set a confidence level for each category
```Rust
let options = Options::default()
.with_confs(&[0.4, 0.15]) // class 0: 0.4, others: 0.15
```
- Go check [Options](src/options.rs) for more model options.
#### 3. Prepare inputs, and then you're ready to go
- Build `DataLoader` to load images
```Rust
let dl = DataLoader::default()
.with_batch(model.batch.opt as usize)
.load("./assets/")?;
for (xs, _paths) in dl {
let _y = model.run(&xs)?;
}
```
- Or simply read one image
```Rust
let x = vec![DataLoader::try_read("./assets/bus.jpg")?];
let y = model.run(&x)?;
```
#### 4. Annotate and save results
```Rust
let annotator = Annotator::default().with_saveout("YOLOv8");
annotator.annotate(&x, &y);
```